介绍
NSDI’14, 15 上发表的两篇有连续性的论文,搭建了FMCW雷达设备来检测室内人类活动。
术语介绍
- TOF Profile: 一个chirp经过傅里叶变换之后会得到每个频率对应的能量。频率跟距离成正比,能量是目标的反射能量。TOF Profile代表了每个距离上的反射能量。
3D Tracking via Body Radio Reflections
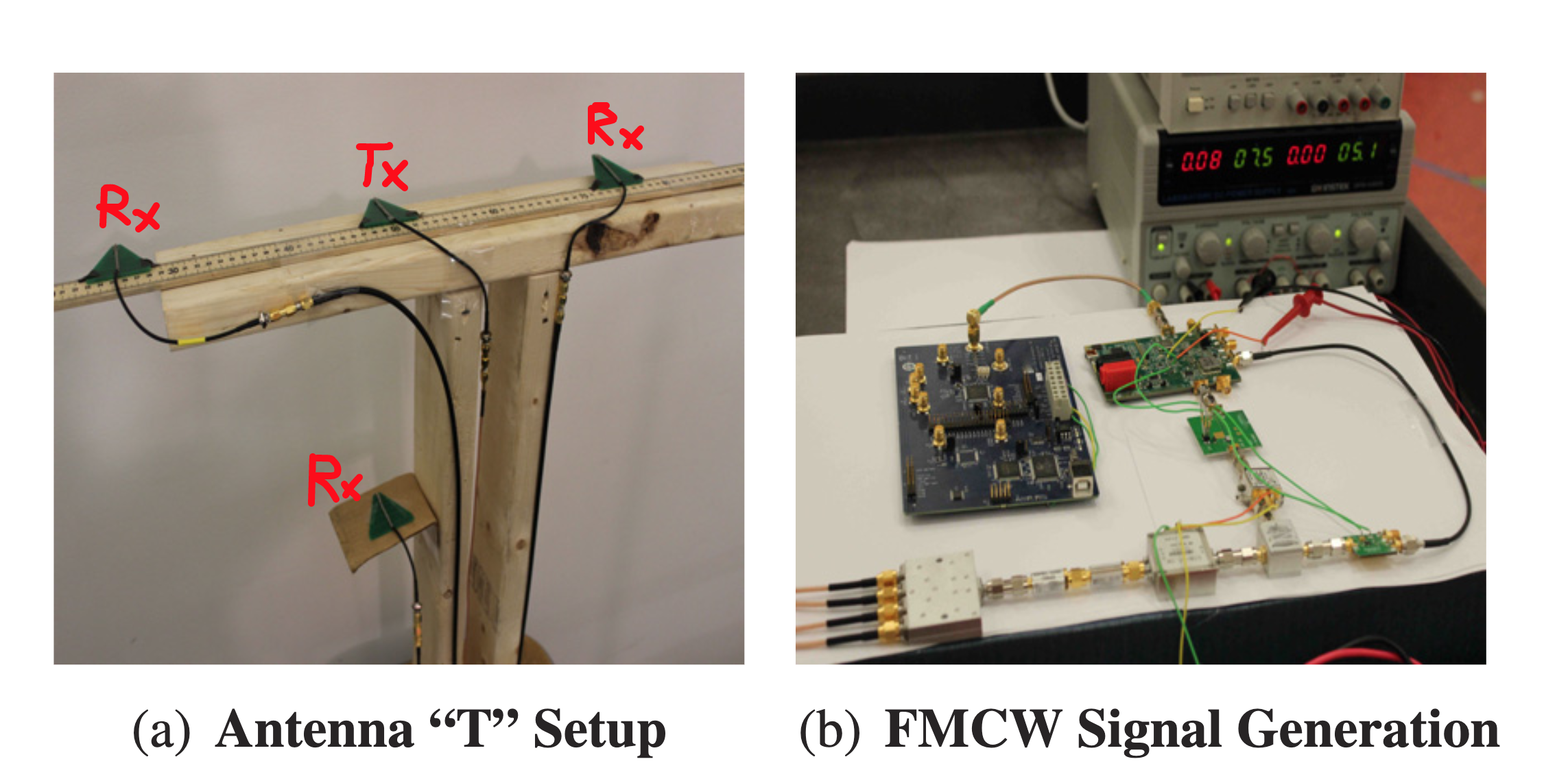
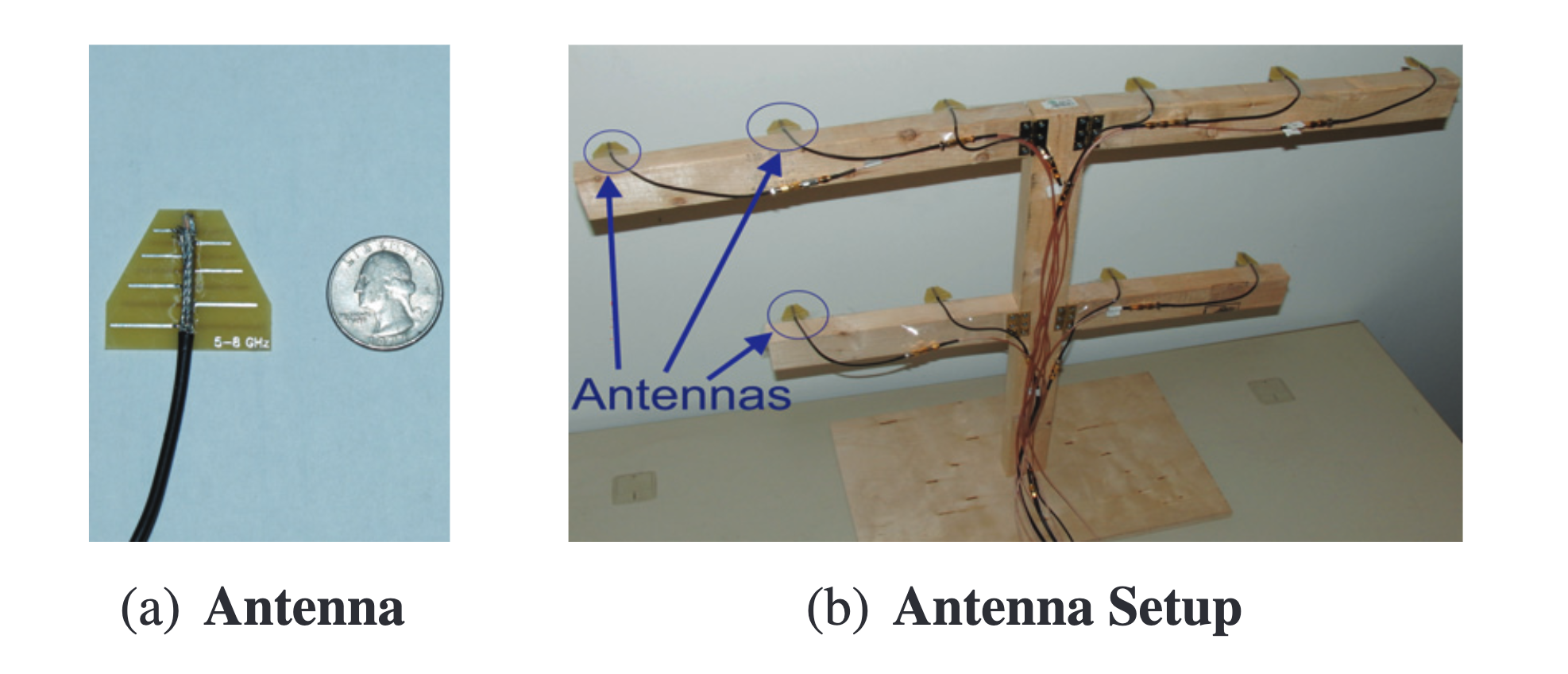
硬件配置:
- 频段:5.56-7.25GHz FMCW Radar
- 天线:1Tx, 3Rx. T型天线,相距1米。
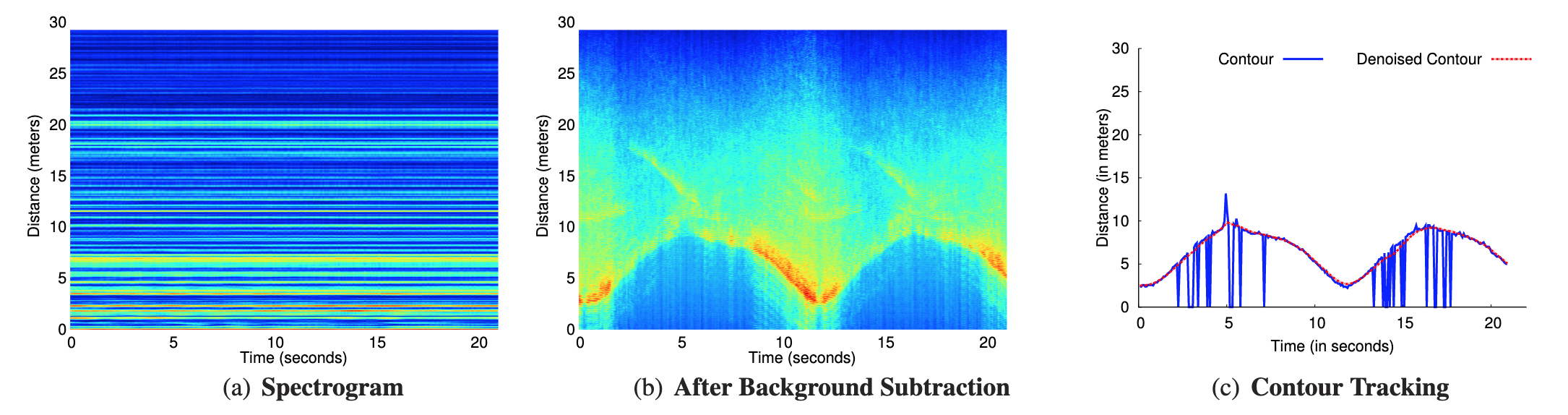
多径效应消除
- 静态多径效应消除 Static Multi-path Removal
- 原因:室内的墙壁、家具反射信号导致的多径效应。
- 假设: 环境反射的信号造成的频移是恒定的。
- 方案: 当前帧减去上一帧,见$(a)\to(b)$
- 动态多径效应消除 Dynamic Multi-path Removal
- 原因:人体的反射信号通过多径反射回Rx,导致多径
- 假设: 直射路径频移最小
- 方案: 取强反射信号的下包络,作为人体的位置。(仅用于单人体检测)。取下包络比取最大值优势在于,人体点位置不会跳变。见$(b)\to(c)$
噪声压制
- 假设人体的短时间的运动是恒定的,检测起始位置用相干累积可以中和掉高斯噪声。
- 异常值检测,过滤掉短时间内跳变的人体点
- 人体静止时,假设人体还在原地,持续跟踪。
- 滤波:距离估计用卡尔曼滤波 Kalman Filter
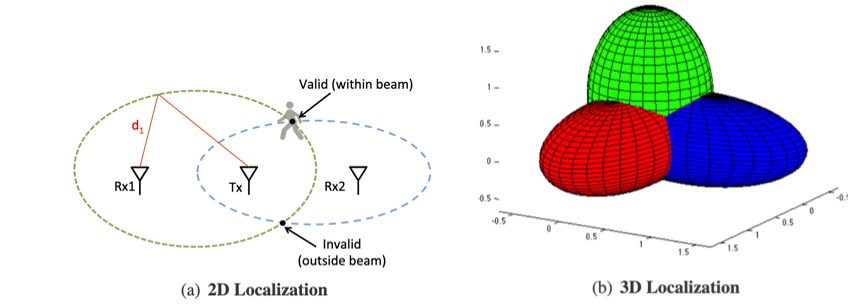
到达角(Angle of Arrival)估计
因为Rx间距一米,不能利用远场公式,通过Rx之间的相位差来估计到达角。
- 2D定位:每个Rx估计的到达距离构成一个椭圆,三个椭圆的交点就是XY坐标
- 3D定位:每个Rx估计的到达距离构成一个椭球面,三个椭球面的交点就是XYZ坐标
区分身体部位
在距离坐标上的分布来看,身体比手臂占的更多。
手势分割
做手势之前先静止一秒钟,举起手臂后再静止一秒钟,最后放下手臂。
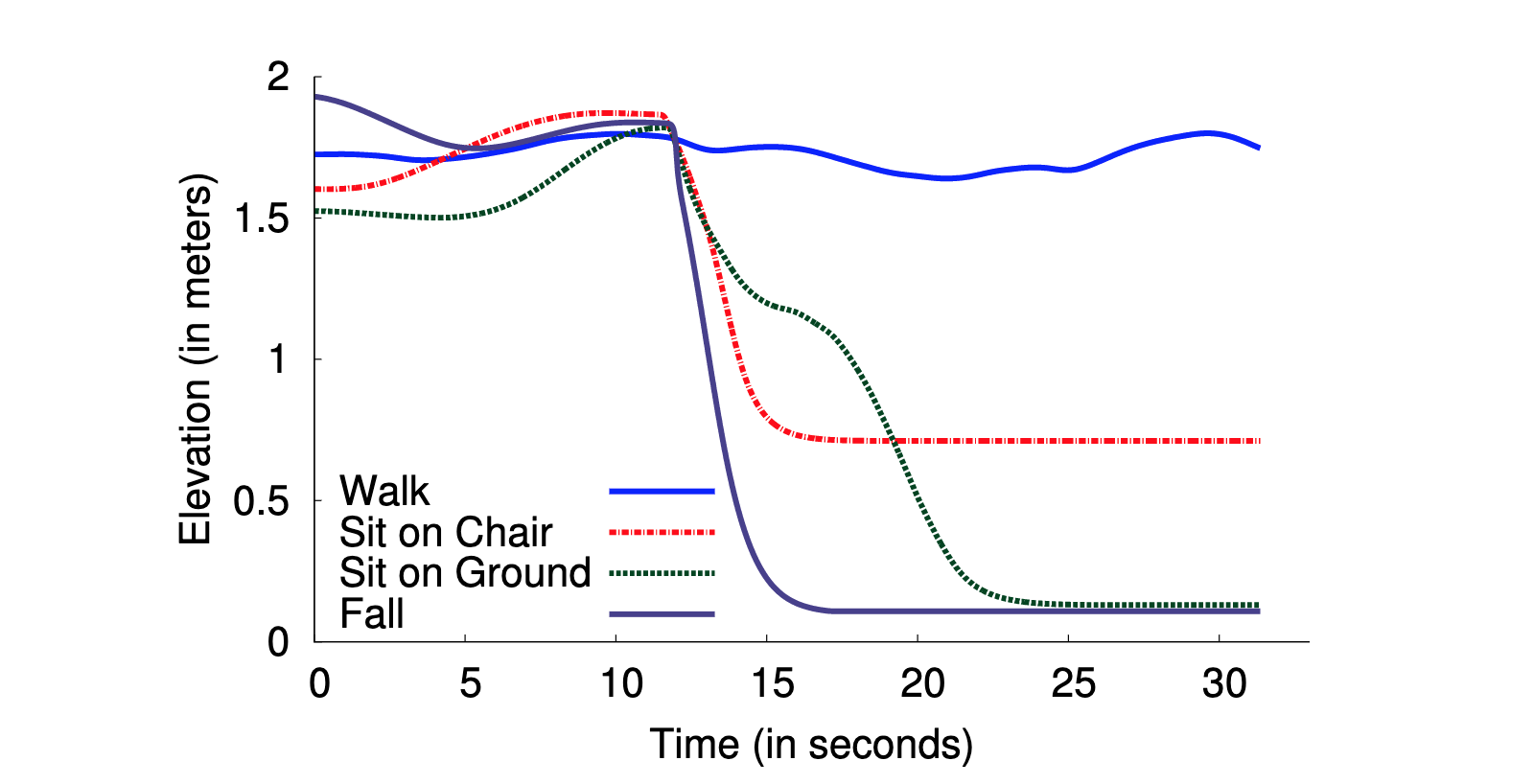
摔倒检测
估计人体高度的变化特征,人体高度从1.7米迅速得变为0m。特征如下图:
局限
- 跟踪一个人体,因为只检测最近的人体
- 不能识别静止的人体,因为静止的人体在背景消除时去掉了。
- 不能识别身体部位,因为只看人体横跨多少距离。
Multi-Person Localization via RF Body Reflections
介绍
相对于WiTrack,WiTrack2.0有如下提升:
- 检测一个人体 -> 检测五个人体
- 检测静止人体
多径消除
- 原因:WiTrack1.0的多径假设是基于单运动人体,多人体或人体静止情况下不再适用。
- 观察:在不同的Tx-Rx测量中,多径信号差别很大,人体测量很稳定。
- 方案:增大天线阵列,增大到5Tx, 5Rx。
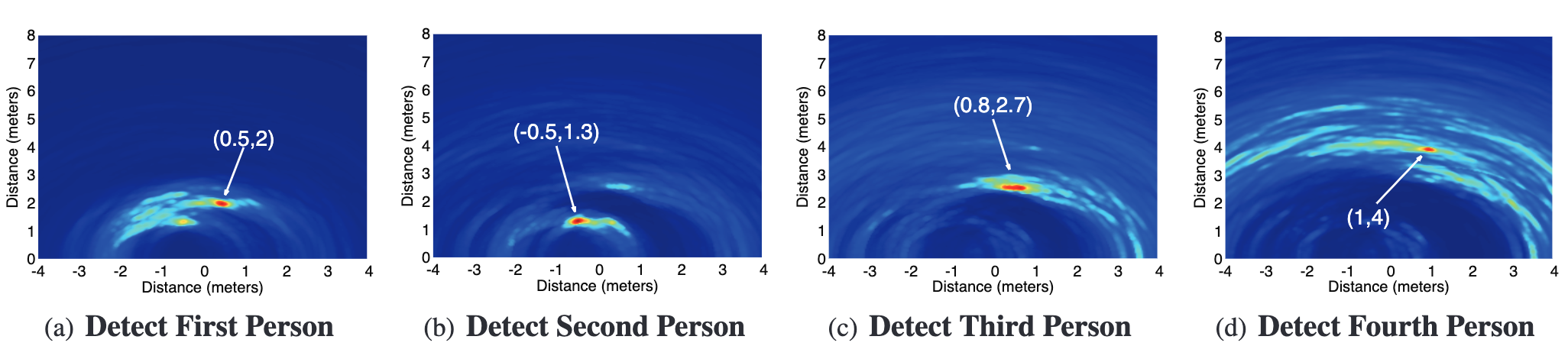
人体近-远问题
- 原因:多个人体由远有近,近人体信号强,远人体信号弱。强信号会遮挡住弱信号。
- 观察:减去强信号后,弱信号就可以被检测出来了。
- 方案:Successive Silhouette Cancellation (SSC), 先检测最近人体,然后减去这个人体。迭代检测出所有人体。
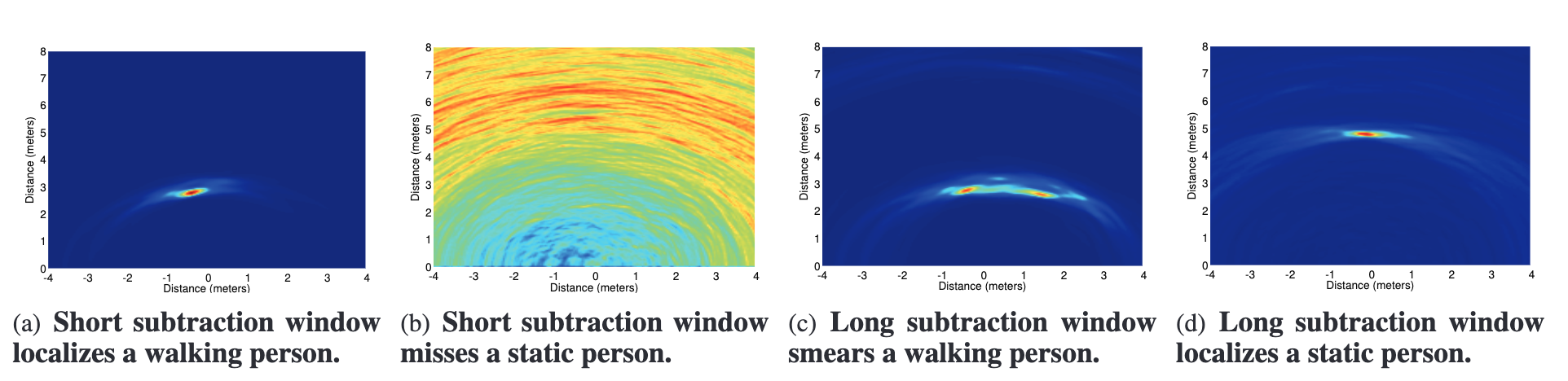
静止人体检测
- 原因:静止人体会有呼吸引起的微弱运动。
- 观察:
- 使用短时间窗口,可以检测到运动人体(a),但是静止人体检测不到(b)
- 使用长时间窗口,可以检测到静止人体(d),但是运动人体会导致模糊(c)。
- 方案:
- 使用短窗口(减去6秒前的帧)检测静止人体;
- 每十秒作为一个时间窗口,选取第一帧作为参考帧,这个窗口内的每一帧都减去这一帧。这样,静止人体的反射可以在窗口的后半部分反应出来。